浅析如何选购扫地机器人-导航系统
扫地机器人之所以能够实现智能化清扫,主要在于它们拥有导航系统,而目前主流系统主要有两种,一种是iRobot公司率先使用的随机碰撞式系统,而另一种则是以Neato公司XV全系列产品为代表使用的路径规划式系统。

▲导航系统是扫地机器人智能化的核心
国内市场上正式销售的产品中采用路径规划式导航系统的较少,主要的只有科沃斯地宝750(Neato公司XV-11的OEM版)和LG公司的Roboking系列。
▲Neato公司的RPS激光定位系统原理图
其中Neato公司的路径规划式导航系统是自主研发的RPS激光定位系统,其通过一套激光测距模组,探测机体至激光扫描到的每个边界点的距离,然后通过所有数据生成数字地图,从而精确计算并定位出机体所处的位置,最终达到基本无遗漏的清扫效果。
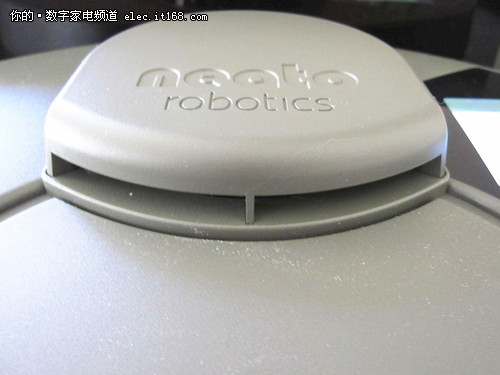
▲Neato公司XV-11机体上的激光测距模组
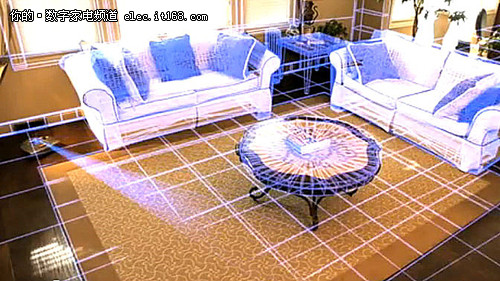
而LG公司全系列产品采用的路径规划式导航系统则是采用摄像定位原理,其通过机体顶部安装的1至2个摄像头,扫描与地面结构相同的天花板,从而生成数字地图,再通过机体底部安装的1个摄像头,使用图像偏移检测技术定位机体所处位置,从而自动构建清扫路径。
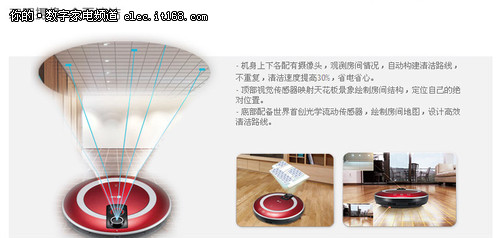
▲LG公司VR5902LVM采用的双眼摄像定位系统原理图【最惠购买链接】
虽然采用路径规划式导航系统的产品,具有整体清扫效率较高且一般无遗漏的优点,但其一般都有可靠性较差、对使用环境有一定的要求(如RPS激光定位系统就要求环境内不能有落地镜等反光物体)的缺点,所以大多数的厂商还是选择了门槛较低的随机碰撞式导航系统。

▲京东商城扫地机器人销量TOP 8都采用随机碰撞式导航系统
采用随机碰撞式导航系统的扫地机器人产品,其大都在机体前部设计有缓冲碰撞板,碰撞板内置缓冲弹簧,可在一定范围内前后位移,在运行中碰到障碍物时,能迅速后退并转向,从而以新的行进路径进行打扫。
▲从iRobot Roomba780实际清扫测试可以看出iAdapt智能化随机碰撞导航系统的优秀
众多采用随机碰撞式导航系统产品中,又以iRobot公司全系列产品独家采用的iAdapt智能化随机碰撞导航系统最为优秀,其对清扫环境没有任何要求,也没有明显的算法BUG,在执行清扫工作时可保证产品状态一直保持稳定。
▲从科沃斯地宝T5实际清扫测试可以看出国产品牌在导航系统上还有待改善
而少部分同样采用随机碰撞式导航系统的国产品牌低端产品,因核心算法的相对简单、甚至是缺陷,导致清扫效果和覆盖率较为随机、脱困能力差且容易卡死等问题,这里也需要提醒各位看官。
总结:虽然清洁家电的不断创新可以有效帮助人们打理自己的生活环境,扫地机器人的出现也契合了某些消费者“偷懒”的需求,但从本篇浅析中我们可以看到,在现今市场上圆形、三轮车结构的扫地机器人占据了主流位置,不同售价的产品差距主要集中在清扫系统、传感器类型和导航系统上。虽然高端型号相较低端产品是具有一定程度上的优势,但在现有技术条件下,扫地机器人还是有诸多弱项有待改善的。

如果您期望着使用扫地机器人完全代替人工扫地,那现阶段小编还是劝您静观其变。但如果您只是想体验一下科技以人为本的魅力,那现阶段购买一台符合本篇介绍优点于一身的扫地机器人产品,小编认为也未尝不可。最后小编衷心希望各大厂商能以消费者需求为本,少虚多实的推出越来越多实惠又好用的扫地机器人。
【京东商城扫地机器人页面直达链接】
【苏宁易购扫地机器人页面直达链接】
【易迅网扫地机器人页面直达链接】
【国美在线扫地机器人页面直达链接】

